

KoncertoⅡ PIV解析算法頁
PIV(Particle Image Verocimetry)是一种流体可视化技术,可以了解流体的相关特性,如瞬时速度和方向。PIV是所谓的飞行时间(TOF)测量技术之一。
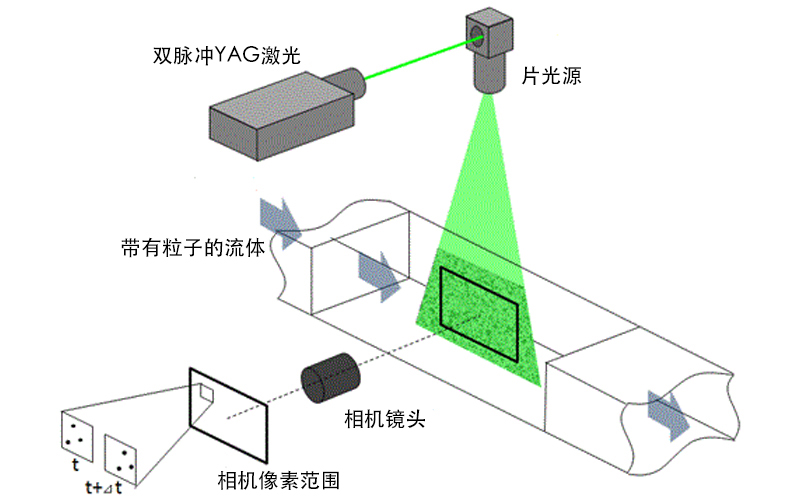
PIV的基本原理是散布小粒子以将需要测量的流体视觉化。对于此时形成的流场内的测定区域,通过使双脉冲YAG激光等激光光源通过片光源光学系统,将其生成为片光进行照射。然后,配合照射时机用双快门照相机连续拍摄2张图像。双脉冲激光与双快门相机同步,能够以以两个非常短的时间间隔,例如不到100μ秒的时间间隔记录2张粒子图像。在分析软件中,通过识别所取得的影像内的各个粒子来计算移动量和移动速度。
PIV有各种各样的类型可供选择:测量被片光照射面内的2次元速度成分的2D-PIV;能够实现片光面内同时多点3次元测量的3D-PIV;能够进行千赫兹到几十千赫兹的高速采样的时间序列PIV;可实现微流体的3D分析流速分布分析的微型PIV;在BOX中设置2台相机、通过光纤传输、实现激光器和相机一体化、无需校准的探头型PIV;使用影绘技术对气泡拍摄解析从而掌握其流动状况的影绘PIV等。PIV原理、分析算法和后处理
由西華数码映像开发的Koncerto II与世界各地流体动力学领域的研究机构密切合作。 PIV分析算法采用德国航空航天局(DLR)开发的新变形关联,可实现高度准确的PIV分析。并且在后处理方面支持时间序列PIV专用算法(FD4),POD分析,涡度显示等。 Koncerto II始终为新技术提供支持,可以随时添加功能。
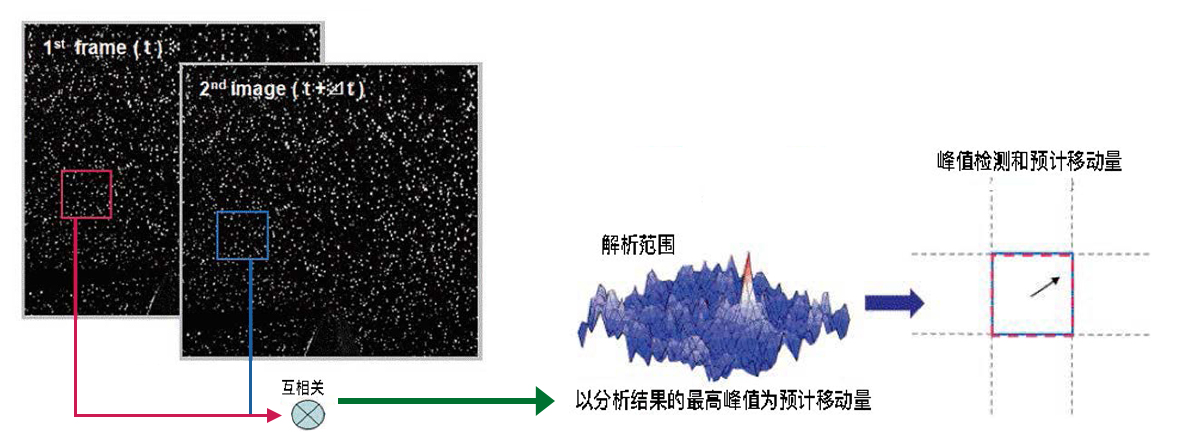
PIV的基本原理是通过检测两个粒子图像中的单个粒子的特定搜索区域内的峰值来计算移动量和移动速度。
获取用于PIV分析的图像
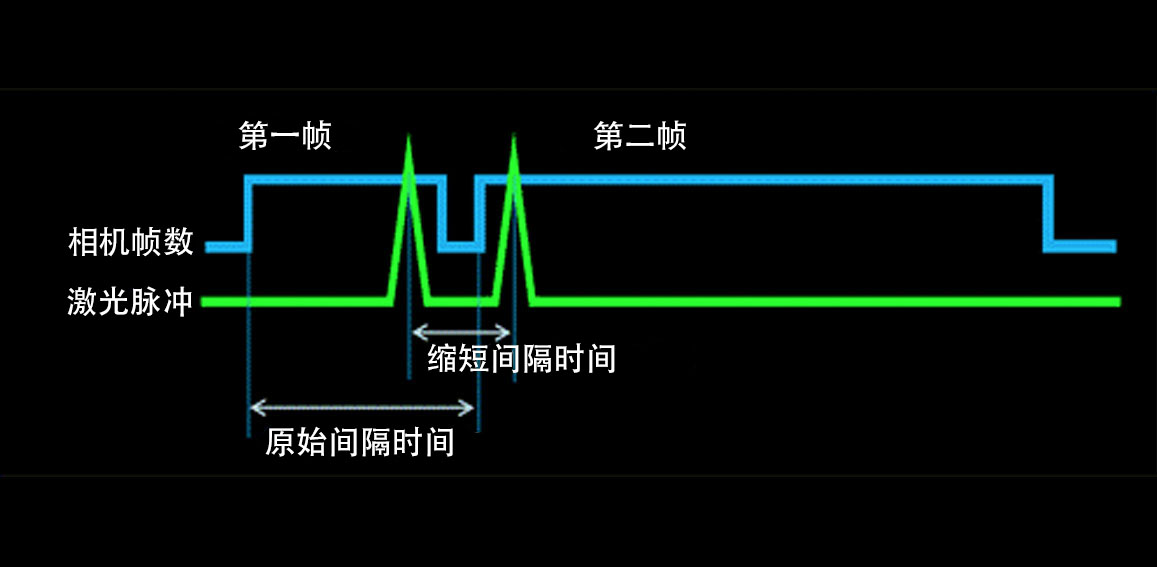
◆ 跨帧技术
PIV需要两个连续的粒子图像,其时间间隔非常短,通常小于100μs。上面的蓝线表示有两个相机曝光,下面的绿线表示有两个激光脉冲。该激光脉冲跨越两次相机曝光之间的帧间时间,称为跨帧。通过跨帧技术能够以最多100纳秒的时间间隔记录两个连续图像。双脉冲激光和双快门相机由定时控制器同步。由于双脉冲激光器具有可以独立操作的两个激光头,因此无论双快门相机的两个帧之间的非曝光时间长度如何,都可以在非常短的时间内进行激光振荡。
◆移动量和速度的评价
通过跨帧技术获得了合适的图片,下一步就是进行PIV分析。图像被分成小的搜索区,通常32×32像素。这些小的搜索区域被称为分析窗(Interrogation窗)。在两个图像的分析窗上使用互相关法,来获得各分析窗的相关面。两个图像上的分析窗位置相同。然后比较评估峰值检测和移动量(FFT互相关),以获得每个分析窗内的主导移动量。通过事先校准,能够计算出(你获得的图像)的像素大小和两个图像之间的时间间隔。取得图像的像素大小是通过拍摄标尺、输入其值等比较简单的校准来决定的。(每像素的距离,是根据比例和目标实施的)
分析算法被设计为根据对象的比例和频率自动调整。
PIV解析算法
◆标准FFT互相关(Standard FFT cross correlation)
能够取得与基本位移(速度)评价法直接互相关基本相同的结果,但只需要很短的时间。
◆简单相关Standard Single-Pass Interrogation
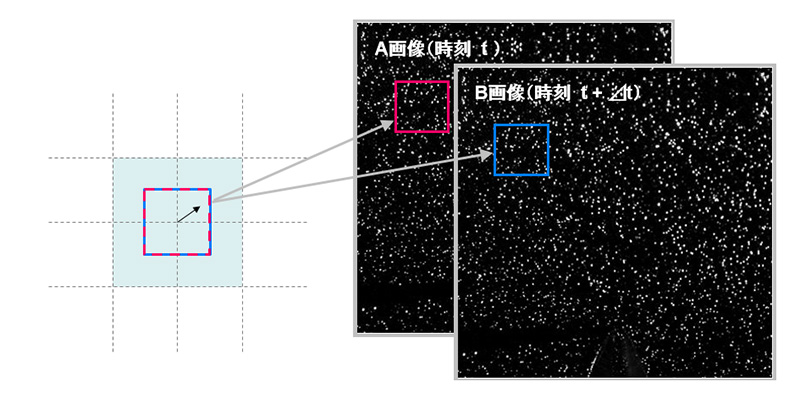
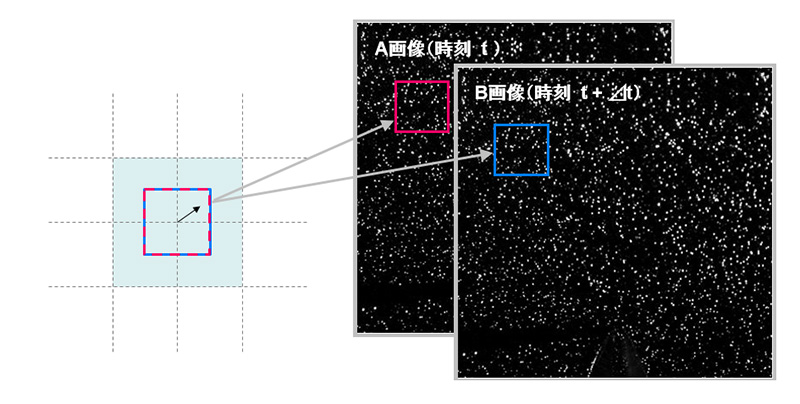
通过相互相关分析求出A、B两张图像的同一区域(交互窗口)内粒子群的移动量。
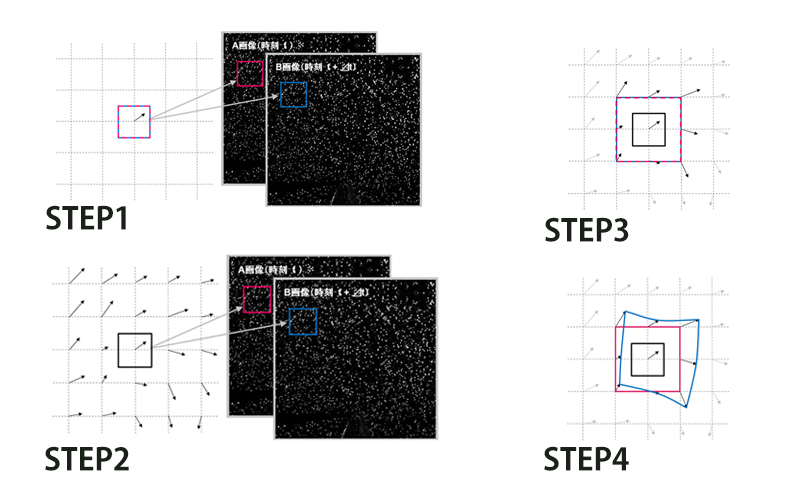
◆递归相关Multipul-Pass Interrogation
在第一步进行标准互相关。然后移动第二图像的分析窗,这些分析窗是基于预测(通过前一标准互相关过程所获得的位移向量)来完成的。之后再一次适用互相关的话,就能得到更小的位移。多次反复使用这个操作的话,结果产生的移动量几乎为零,解析精度提高。
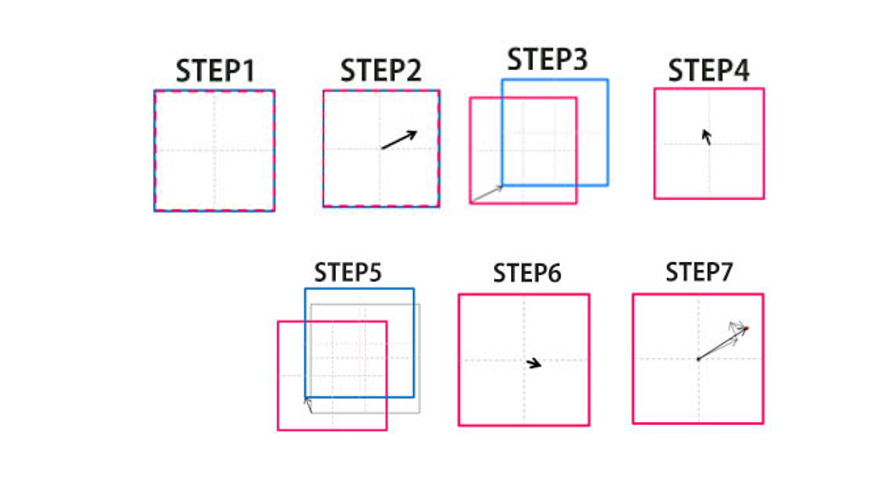
STEP1:定义A图像内的窗口A(红框)和B图像内的窗口B(蓝框)。
步骤2:取窗口a和窗口b的关联,求移动量作为预编码器1。
STEP3:通过影响器1将B图像内的窗口B移位,将其作为窗口B’。
STEP4:取窗口a和窗口b’的关联,求移动量而作预扩散器2。
STEP5:取窗口a与窗口b’的相关,求移动量而作预编码器2。
STEP6:取窗口a与窗口b的相关联,求移动量而作预编码器3。
STEP7:反复进行该处理,窗口中的非对应粒子减少,相关值上升,精度提高。最终目标的终点是初始网格中的代表移动量。
◆阶层相关Multi-grid Interrrogation
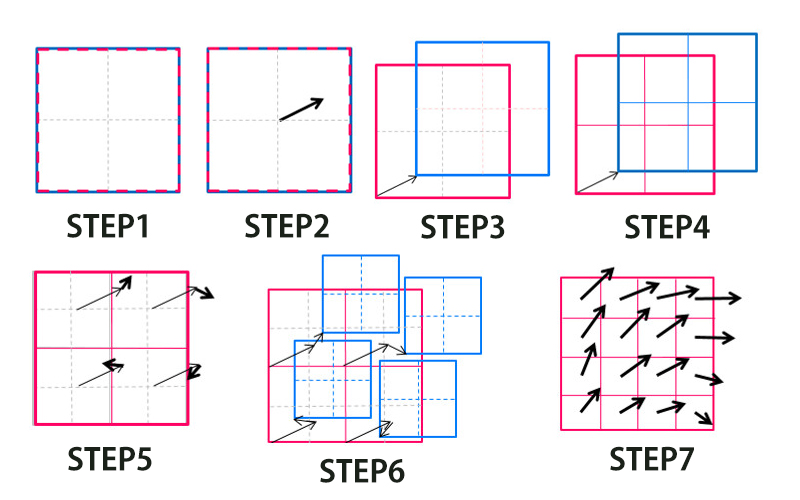
阶层相关。在递归相关中每次重复分析时减小窗口大小。保持最大移动量,可以减小窗口,从而在保持速度的动态范围的同时提高空间分辨率。另外,即使在主窗口内有旋转也可以对应。
STEP1 :定义A图像内的窗口a(红框)和B图像内的窗口b(蓝框)。
STEP2:窗口a与窗口b相关,求出移动量并设为前视器1
STEP3:由预览器1移位B图像内的窗口b,设为窗口b’。
STEP4:窗口a.b’也分成四部分。
STEP5 :在各自的1/4窗口中取得相关性并求出移动量,作为前视器2 (21, 22, 23, 24 )。如果图形在缩放窗口内有旋转。
STEP6 :通过四个前视器2(21, 22, 23, 24 ),分别将B图像内的窗口b1,b2,b3,b4位移。
STEP7 :通过反复这个处理,可以同时提高精度和分辨率。
每个最终窗口中的目标被分割的每个网格中的代表移动量。
◆中心差分Central difference Interrrogation
在重复互相关处理中,将第一图像的分析窗之间的互相关移动到预测符值的1/2后方(通过标准相互关获得的位移),将第二图像的分析窗向预测符的前方移动1/2。通过这个操作,在PIV分析中能得到正确的二次处理。
◆双(多)相关Double (multi) correlation
通过将两个相邻的解析窗的相关面相结合,增加规则的信号成分。减少随机噪声,从而提高信号与噪声比率。
◆图像变形相关Image deformation correlation
在重复处理中,根据样条函数根据周围的预测符改变图像。如果重复应用此操作,则结果的第二个图像将与第一个图像大致相同。
◆多程互相关>Multi pass cross correlation
第一步应用默认互相关。接下来,根据预测符(在之前的标准互相关过程中获得的位移向量)移动第二图像查询窗口。然后,再次应用互相关。此次能得到更小的位移。重复应用多次此操作后,结果产生的位移大致为零。最终位移是上一个过程的所有位移的总和。
◆多重网格互相关Multigrid cross correlation
多网格互相关通过多路径动作的各次重复来减小提问窗口的大小。多网格方案的优点在于获得较高的空间分辨率和/或更宽的速度动态范围。
◆平均相关Average correlation
这个操作对微PIV等噪音多的图像有效。也可以减少来自布朗运动的噪音。仅适用于平均分析而不是瞬间分析。
◆图像变形相关Image deformation correlation
根据互相关来确定周围的预测向量的值。根据周围的预测子,对第二个图像(蓝色)的解析窗的形状进行变形。
・根据相互关联决定周围预测向量的值
・根据周围预测符改变第二图像(蓝色)的问题窗口的形状。
・在黑色窗口之间再次应用互相关,获得比上一个过程小的位移。
以这样的顺序进行。该算法基于多路径分辨率和多网格分辨率获得的播放器对图像本身进行变形。解析窗户即使有旋转和变形也有效果。通过递归地以子像素精度进行图像变形,可以大体上完全去除由于峰值曲线的错误。重复处理时,根据样条函数根据周围的预测符改变图像。如果反复应用此操作,则结果获得的第二图像将几乎与第一图像变形,结果产生的位移将几乎为零。
STEP1 :与通常的相关法相同,求出A图像内的窗口a和B图像内的窗口b(同位置)内的粒子组的移动量。STEP2:接着,同样地确定周围网格中的粒子组的移动量。
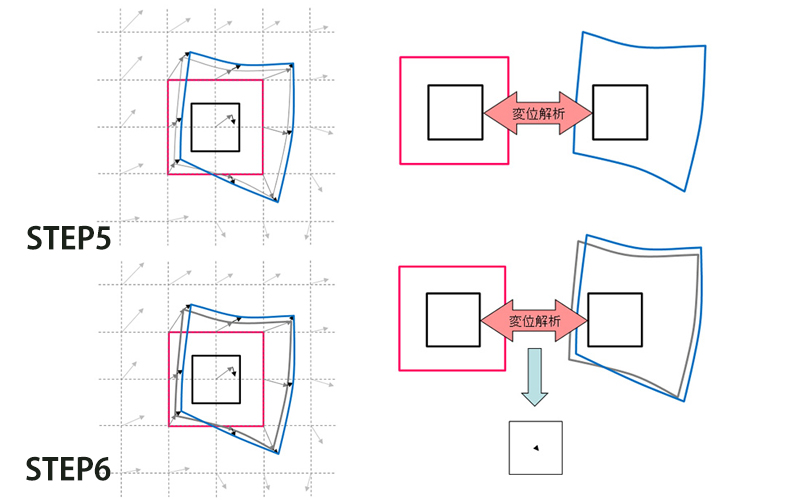
STEP2 :接着,同样地确定周围网格中的粒子组的移动量。
STEP3 :考虑分析中央黑色窗口时。将周围的网格的移动量作为预览器变形B图像。
STEP4 :以示意方式描绘图像变形,如图所示。将各网格作为基准点连续地图像变形。将图中的红框上的网格8点变形为蓝色框。
STEP5 :取A图像内的窗口a与B图像内的窗口b的相关,求出移动量并更新主体。
STEP6 :通过任意次数重复该处理提高精度。
每个最终窗口中的目标被分割的每个网格中的代表移动量。
◆时间序列PIV算法FD4
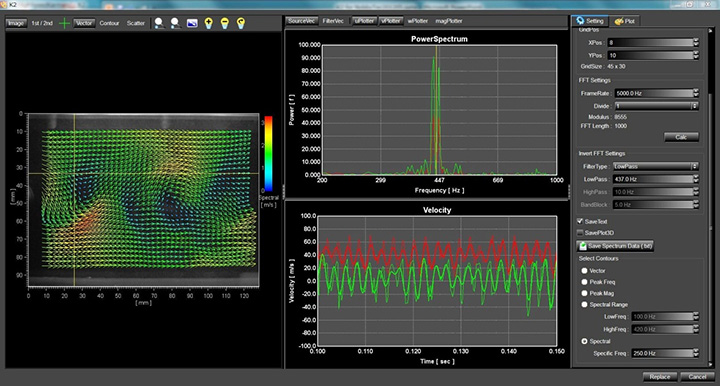
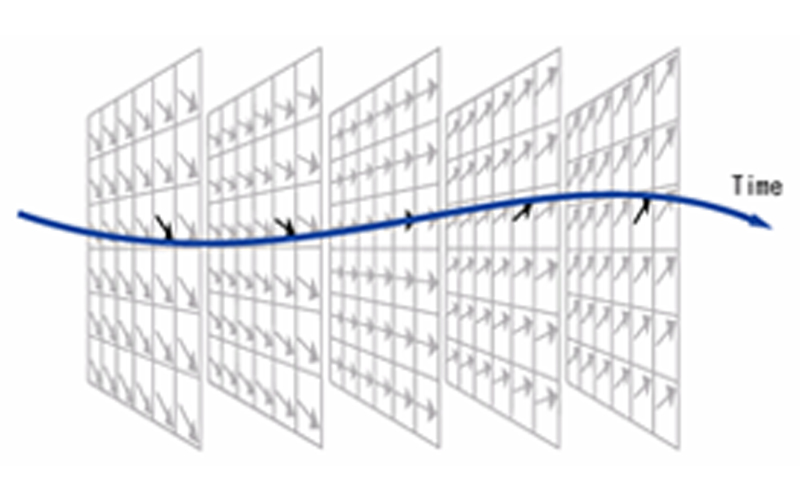
FD4相干是用于时间序列PIV而开发的算法,可以对PIV的各网格中的时间速度变动频率和紊乱进行分析、进行高精度的时空间验证等。
即使是看上去正确的矢量图,沿着时间轴分析的话,也会发现过错向量。在常规二维平面中的PIV分析中,分析时产生的过错向量通过空间验证确定正误并删除错误向量,并通过来自周围向量信息进行内插填补。要正确进行内插,周围的向量必须正确。在网格上连续发生错误矢量的情况下,内插可能不准确。因为流程在时间上连续,在时间序列PIV,这样的情况根据时间轴进行分析,能够提高精度。

◆FD4验证效果
图的上下矢量图是同时刻的瞬间速度矢量图。
只看静态图时,解析正确。但是,从时间序列动画来看,能够发现FD4验证未适用(上)漩涡附近的向量振动不自然。另一方面,在应用了FD4验证(下)的数据中,可以看出每个时刻的向量在时间上连续。

◆时间轴分析
在时间序列PIV中,由于前后的数据具有连续性,所以错误向量在空间验证中处理之后,还可以在时间上与前后的数据进行比较来判断错误。但是,由于时间上接近,前后的数据也常常成为过错向量,因此仅仅与前后的数据比较是不够的。因此,FD4关系对矢量图上的各个网格中的时间方向的速度变动的向量进行分析,计算该时刻的理论最佳值。由于傅立叶变换得到的速度变动频谱一般是高频侧的噪音成分,因此对这个实施低频滤波器,除去噪音成分之后,通过逆傅立叶变换返回到时域数据。
观察以纵轴为速度,横轴为时间的速度变化曲线,错误向量可以在曲线上作为钉状的噪音被观察到。施加了低频滤波器后,速度变动曲线上的钉状噪音消失,曲线变得顺畅。根据此曲线计算该时间段的理论最佳值,可获得可靠性较高的内插值。(左图)
FD4验证除了像上述的仅利用空间连续性的传统方式的变化之外,还可以通过利用时间连续性来实现更高精度的测量。
※1 时间序列PIV用FD4验证,是东京工业大学宫内・店桥研究室开发的算法,是专利技术。
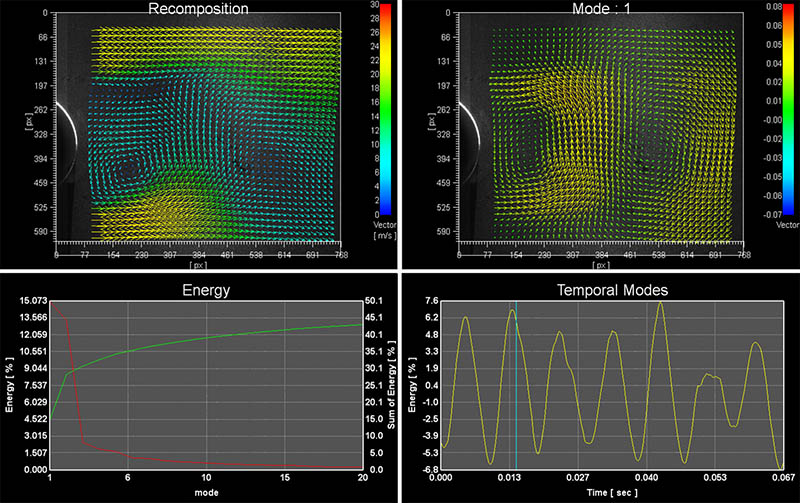
◆ 固有直交分解 POD
POD(固有直行分解)是用于从PIV得到的流场的速度向量数据中提取重要流程结构的预处理功能。在POD中,将PIV中获得的流场的向量数据(源向量)按能量顺序分解为多种模式(构造)。通过将源向量和任意选择的模式重构向量场,可以得到仅反映该模式给流动能量的简化重建向量。对与CFD数据的比较和流体控制的解析等非常有效。


